利用 RS485 实现 Modbus 通信的完整步骤
利用 RS485 实现 Modbus 通信的完整步骤
1. 关于 Modbus
Modbus 是一种通用的工业通信协议,广泛应用于自动化领域中设备之间的通信。它最初由 Modicon(现在的施耐德电气)于 1979 年开发,是一个开放标准的协议。
在 OSI 模型中,Modbus 通常被归类为应用层协议,可以说RS485 是 OSI 模型中的物理层实现,负责电气和机械特性,Modbus 则通常处于 OSI 模型的应用层,负责定义数据传输的结构、规则和协议。
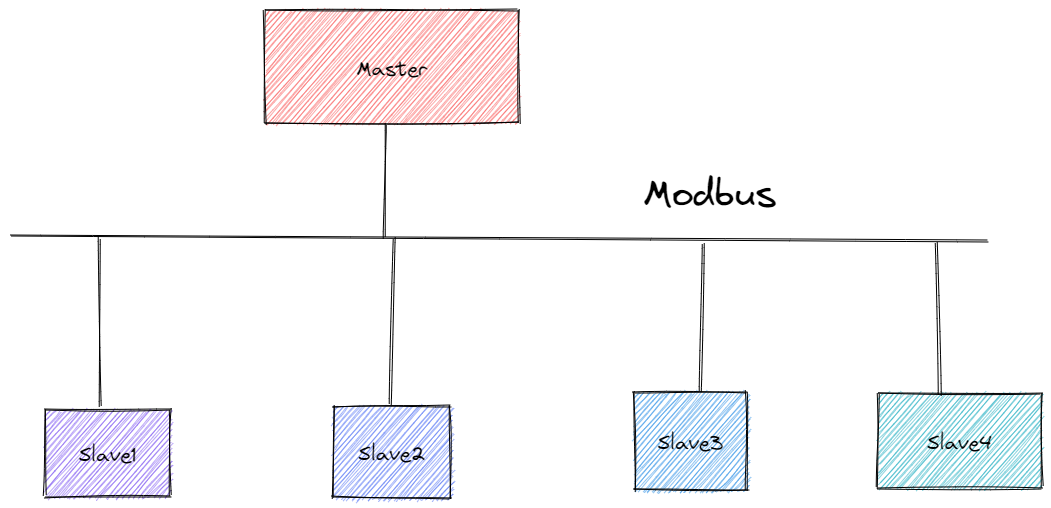
Modbus 协议支持多种通信介质和网络,包括 RS232、RS485、TCP/IP,通常用于建立主从结构的通信,主站发送请求(查询)给从站,从站响应请求并返回数据。
协议类型:
- Modbus RTU:基于串行通信,通常使用 RS-232 或 RS-485 接口。
- Modbus ASCII:基于 ASCII 编码的串行通信协议。
- Modbus TCP:基于 TCP/IP 网络通信的协议,以太网为基础。
一主多从
2. 交叉编译 libmodbus
由于我们需要使用 libmodbus 这个库,而我将在 ARM 开发板上运行,所以需要下载 libmodbus 的库进行交叉编译
2.1 下载 libmodbus
我这里下载了最新的 3.1.10
解压
tar -zxvf libmodbus-3.1.10.tar.gz2.2 配置编译环境
解压后进入libmodbus-3.1.10目录
./configure --host=arm-linux-gnueabihf --prefix=/usr/local/arm-libmodbus如果你没有安装 ARM 的交叉编译工具,则
sudo apt install gcc-arm-linux-gnueabihf2.3 编译并安装库
make
sudo make install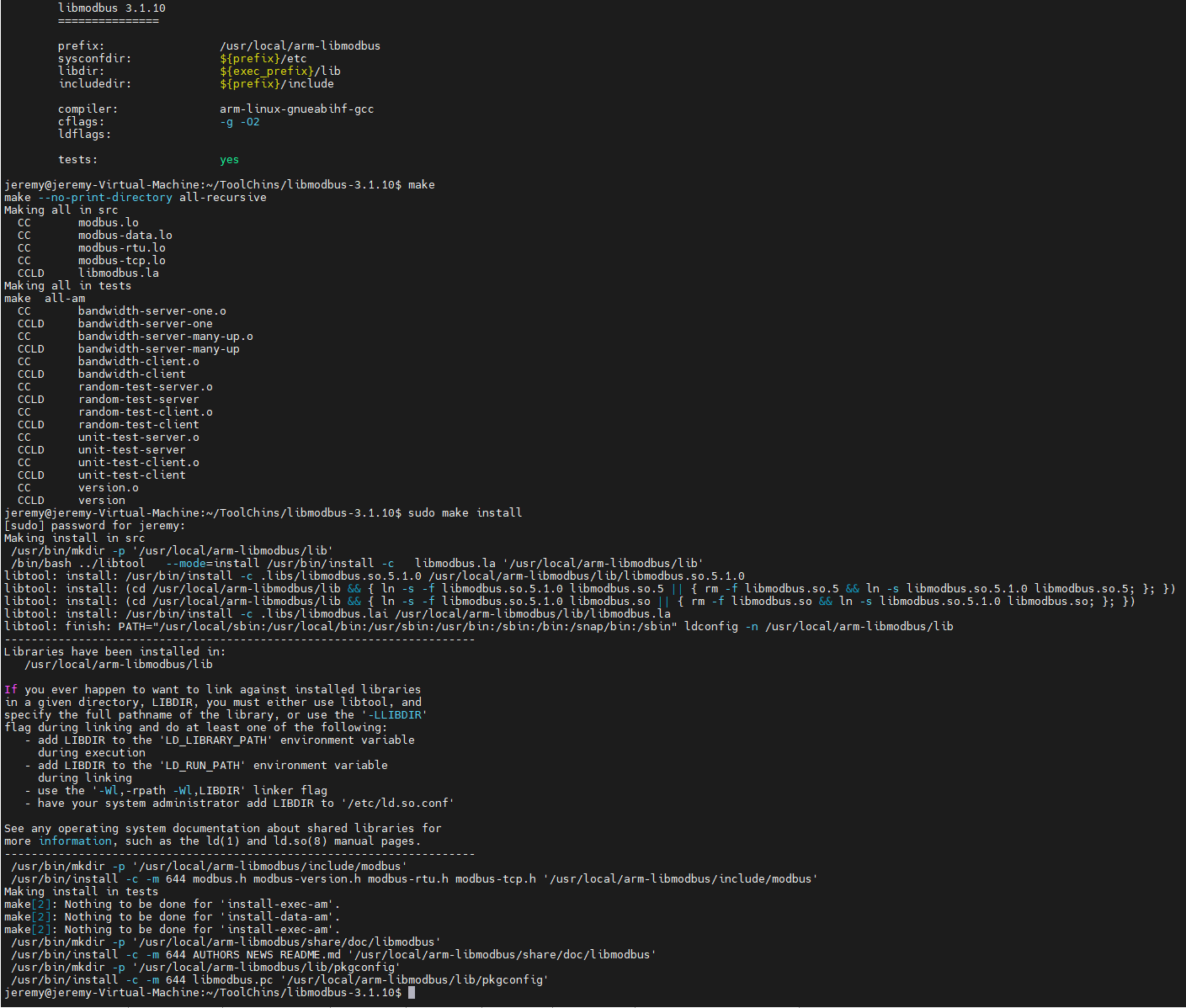
3. 复制编译好的文件到 ARM 板
在板子上运行引用到 libmobus 的库还需要将编译好的库文件和头文件复制到 ARM 板上
3.1 打包库文件
进入/usr/local/arm-libmodbus目录打包
cd /usr/local/arm-libmodbus
sudo tar czvf arm-libmodbus.tar.gz lib include3.2 安装库
将压缩包丢到板子上后进行解压
tar xzvf arm-libmodbus.tar.gz复制文件
sudo cp -r lib/* /usr/lib/
sudo cp -r include/* /usr/include/此时库安装完毕
4. C 程序测试 Modbus RTU
Modbus 协议定义了数据的帧格式,包括地址、功能码、数据区域和校验等部分
如果直接使用 RS485 通信,没有固定的数据格式和通信流程,需要自行处理数据帧的校验、错误检测和恢复等问题
前面准备工作已经做完了,接下来写个 C 程序来测试使用 Modbus RTU,使用 RS485 接口
我下面的代码特地将波特率抽了出来放在一个头文件中,你也可以直接写死或者进行外部传参
4.1 master.c
#include <stdio.h>
#include <modbus.h>
#include <errno.h>
#include "config.h"
int main()
{
modbus_t *ctx;
uint16_t tab_reg[32];
// 创建新的 RTU,波特率设置为 115200
ctx = modbus_new_rtu("/dev/ttyACM0", BAUD_RATE, 'N', 8, 1);
// 设置 Modbus 从机 ID 为 1
modbus_set_slave(ctx, 1);
// 连接到 Modbus 从机
if (modbus_connect(ctx) == -1)
{
fprintf(stderr, "连接失败: %s\n", modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
// 从地址 0 开始读取 10 个寄存器
if (modbus_read_registers(ctx, 0, 10, tab_reg) == -1)
{
fprintf(stderr, "读取失败: %s\n", modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
for (int i = 0; i < 10; i++)
{
printf("寄存器 %d: %d\n", i, tab_reg[i]);
}
// 关闭连接并释放 Modbus
modbus_close(ctx);
modbus_free(ctx);
return 0;
}4.2 slave.c
#include <stdio.h>
#include <modbus.h>
#include <errno.h>
#include "config.h"
int main()
{
modbus_t *ctx;
modbus_mapping_t *mb_mapping;
// 创建新的 RTU,波特率设置为 115200
ctx = modbus_new_rtu("/dev/ttyACM0", BAUD_RATE, 'N', 8, 1);
// 设置 Modbus 从机 ID 为 1
modbus_set_slave(ctx, 1);
// 连接到 Modbus 主机
if (modbus_connect(ctx) == -1)
{
fprintf(stderr, "连接失败: %s\n", modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
// 分配 Modbus 映射(100 个保持寄存器)
mb_mapping = modbus_mapping_new(0, 0, 100, 0);
if (mb_mapping == NULL)
{
fprintf(stderr, "映射失败: %s\n", modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
while (1)
{
uint8_t query[MODBUS_RTU_MAX_ADU_LENGTH];
// 从 Modbus 主机接收查询
int rc = modbus_receive(ctx, query);
if (rc > 0)
{
// 回复查询
modbus_reply(ctx, query, rc, mb_mapping);
}
else if (rc == -1)
{
fprintf(stderr, "接收失败: %s\n", modbus_strerror(errno));
break;
}
}
// 释放 Modbus
modbus_mapping_free(mb_mapping);
modbus_close(ctx);
modbus_free(ctx);
return 0;
}4.3 config.h
放置配置的头文件,注意头文件保护符
#ifndef CONFIG_H
#define CONFIG_H
#define BAUD_RATE 115200
#endif // CONFIG_H4.4 Makefile
写个简单的 Makefile 方便编译
CC = arm-linux-gnueabihf-gcc
CFLAGS = -Wall -I/usr/local/arm-libmodbus/include/modbus
LDFLAGS = -L/usr/local/arm-libmodbus/lib -lmodbus
all: master slave
master: master.o
$(CC) -o master master.o $(LDFLAGS)
slave: slave.o
$(CC) -o slave slave.o $(LDFLAGS)
master.o: master.c config.h
$(CC) $(CFLAGS) -c master.c -o master.o
slave.o: slave.c config.h
$(CC) $(CFLAGS) -c slave.c -o slave.o
clean:
rm -f master slave *.o4.5 运行结果
使用chmod +x [file]给文件权限,运行成功你可以看到以下信息,代表基于 RS485 的 Modbus 通讯成功
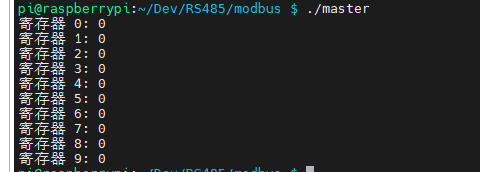
如果只是简单测试通讯,那么到这里就可以了。
相关文章:
END